Главная » » пересечении нулевого метода обнаружения
21:27
пересечении нулевого метода обнаружения
Аннотация: традиционные системы управления бесщеточный двигатель постоянного тока ротора точность определения положения не высоко в состоянии внес DSP основе датчиков бесщеточный двигатель постоянного тока контроля оборудования и программного обеспечения структуры. Бесщеточный двигатель постоянного тока через выявление положения ротора, выдвинутые всеобъемлющего TMS320F2812 чип в качестве основного метода определения положения ротора на программные алгоритмы для получения информации о местоположении ротора, тем самым повышая скорость работы системы, чтобы снизить затраты системы.
1 Введение
Бесщеточный систему управления двигателем производительности достигнуто несущего винта определения положения зависит от точности сигнала в реальном процессе производства, часто трудно получить точные ротора сигнал позиции. Sensorless бесщеточный двигатель постоянного тока системы управления не в условиях с использованием физических датчиков, использование напряжение двигателя, информации, программного обеспечения, чтобы получить алгоритм ротора положение может улучшить скорость работы системы случае, для дальнейшего сокращения стоимость системы. В ответ на работе представлены новые DSP управления на основе бесщеточный двигатель постоянного тока, бесщеточный двигатель постоянного тока ротора композитных роторов метод определения положения методов обнаружения, в целях достижения лучшей позиции измерения; мощным DSP обработки и вычислительных ресурсов и программного обеспечения, оптимизированного дизайна, для получения точного сигнала состоянии точно контролировать двигателя.
В данной работе предыдущей противо-ЭДС через ноль сложности шлейфа, время задержки трудно компенсировать дефицит TMS320F2812 скорость работы в сочетании с характеристиками нового DSP основе противо-ЭДС через ноль метод обнаружения.
2 Оборудование Дизайн безщеточный управления двигателем постоянного тока
Бесщеточный двигатель постоянного тока, используя обычный трехфазный инвертор власти, которая имеет трапециевидную ЭДС обмотки и квадратные волны ток каждого фаз питания обмотки 120. Электрический угол, бесщеточный двигатель постоянного тока в нормальном свою очередь, только в течение двух фаз обмотки под напряжением, другой фазы обмотки отключен, поскольку не существует отключить обмотку ток, поэтому напряжение на клеммах отражает относительный размер обмотки ЭДС, ведущих анти-ЭДС через ноль коммутации обмотки номер 30. Угол.
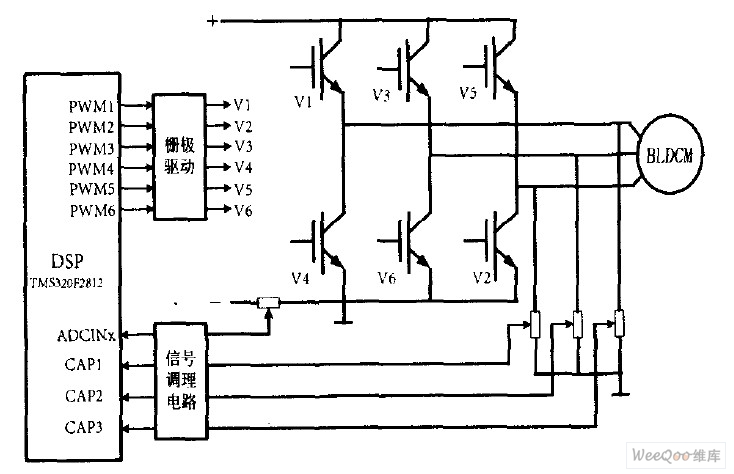
Система использует PWM скоростной режим, главной цепи питания трехфазных полный мостовой схеме звезды. Мотор для "двухфазной трехфазные шесть-на-государство" образом. Стратегия борьбы в качестве основной системы обработки DSP цифровой скорость PI контур управления, судья фазе компенсации, а также другие функции, положение ротора обнаружены анти-ЭДС через ноль обнаружения.
Использование TMS320F2812 чип с необходимой периферийных цепей, представляют наименьший DSP системы, как показано на рисунке 1. Основной принцип схемы: один ШИМ сигнала с помощью DSP Встроенный 6-канальный независимых волны PWM, PWM1 ~ PWM6 контакты контролируется PWM сигнал выхода; текущей выборки входного сигнала через порт АЦП, 3-полосная датчик положения выход на сопротивление делитель подключен к DSP после захвата единицы, в качестве бэк-EMF пересечения нулевого уровня обнаружения сигнала; ШИМ сигнал усиливается привод цепи, а затем привод цепи в соответствии с требованиями порядка корма включения / выключения IGBT, для достижения соответствующей обмотки статора BLDCM кормить правильно.