Главная » » Методы стабилизации напряжения в импульсных преобразователях напряжения
23:05
Методы стабилизации напряжения в импульсных преобразователях напряжения
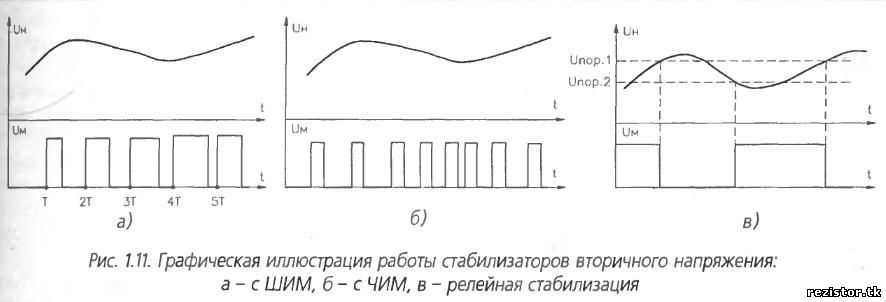
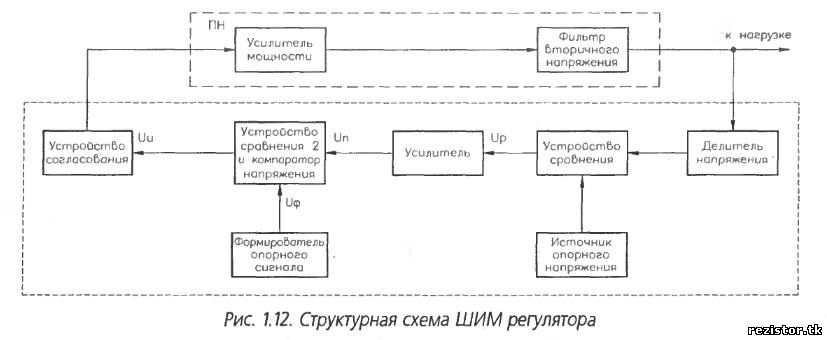
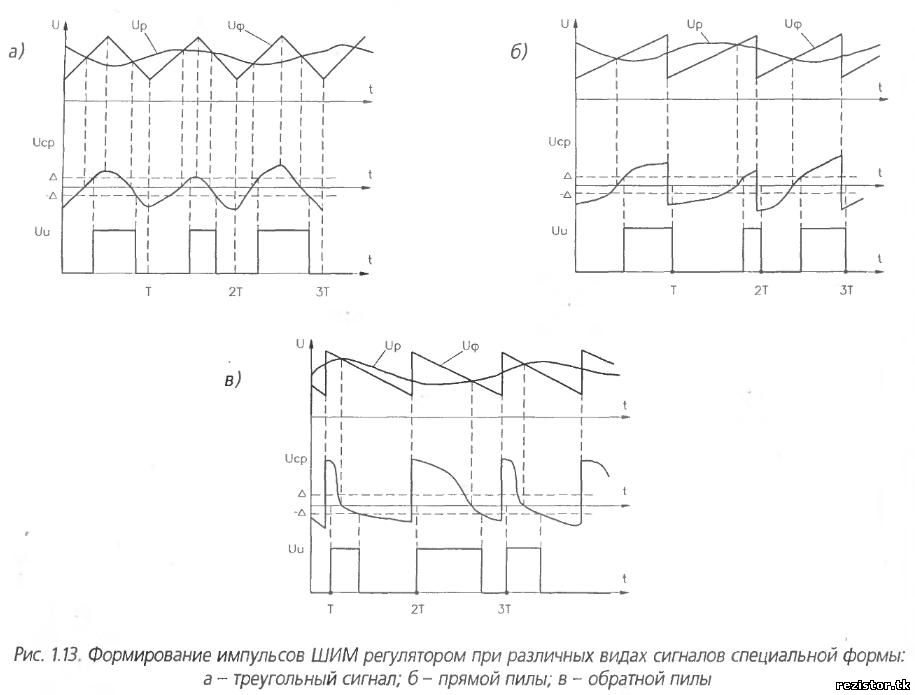
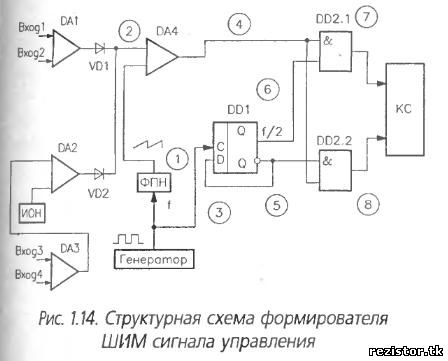
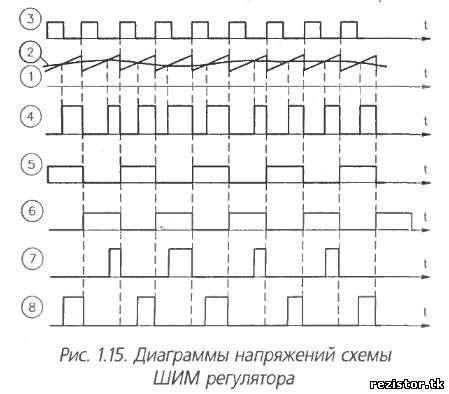
Как отмечалось выше, одним из основных преимуществ ИБП является возможность преобразования первичной электрической энергии с более высоким КПД по сравнению с обычными трансформаторными источниками питания. Чаще всего это достигается за счет стабилизации выходного напряжения воздействием на процесс функционирования силового усилительного каскада преобразователя напряжения. Только в многоканальных ИБП с различными нагрузочными возможностями каналов при необходимости применяются дополнительные линейные или импульсные стабилизаторы вторичного напряжения. Для стабилизации величины выходного напряжения используются методы регулирования количества энергии, поступающей во вторичную цепь. Основными среди них являются: ШИМ, ЧИМ и релейная стабилизация напряжения. Эти методы отличаются способами воздействия на силовой (усилительный) каскад высокочастотного преобразователя, активные элементы которого работают в ключевом режиме. Как правило, система управления выполняется на маломощных компонентах, представляющих собой комбинацию аналоговых и цифровых элементов. Согласно рис. 1.2 узел регулирования состоит из: • измерительной цепи, определяющей отклонение реальной величины напряжения нагрузки от номинального значения; • схемы управления - формирователя конечной формы ВЧ сигнала, непосредственно воздействующего на силовые элементы преобразователя. В состав этого узла включены элементы, которые согласуют уровни сигналов и нагрузочную способность каскадов; • задающего генератора - маломощная схема формирования колебаний с базовыми характеристиками, которые подвергаются изменениям в схеме управления. Принцип действия ШИМ стабилизации заключается в изменении длительности импульсов, усиливаемых силовым каскадом, без коррекции собственно частоты колебаний и их амплитуды. Длительность импульсов, формируемых схемой управления, должна быть обратно пропорциональна величине напряжения на нагрузке. Процесс стабилизации вторичного напряжения с помощью ШИМ представлен на рис. 1.11а. Кривая Uri отражает изменение напряжения на нагрузке при отсутствии стабилизации. Характер изменения длительности импульсов в зависимости от Ui( показан на графике U^., временная шкала содержит отметки кратные Т - условному периоду следования импульсов. В отличие от предыдущего способа, ЧИМ стабилизация характеризуется модификацией частоты управляющего сигнала при постоянной длительности импульсов. На качественной диаграмме отработки частотным модулятором изменения напряжения U(i, приведенной на рис. 1.116, показано изменение частоты импульсов, обратно пропорциональное значению U(|. В релейной системе стабилизации цепи управления отслеживают изменения напряжения на нагрузке и, когда его значение выходит за пределы допустимой зоны стабилизации, производится формирование импульсов, при воздействии которых и происходит «подкачка» энергии в цепь нагрузки. На рис. 1.11в изменением управляющего импульсного сигнала UM(I) изображено регулирование уровня напряжения на нагрузке UB. Уровнями UW( , и U(ii 2 задан диапазон, в рамках которого должно находиться Uu. Генерация импульса начинается в момент понижения U(i ниже уровня U(i 2, а прекращается при его возрастании более установленного U ,. Как видно из рисунка, частота следования импульсов и их длительность варьируется в широких пределах и определяется свойствами нагрузки. Диаграммы показывают качественную сторону регулирования и не отражают реальную картину процессов с учетом задержек срабатывания схем и погрешностей измерений. Способ ШИМ стабилизации, несмотря на некоторое схемотехническое усложнения узла по сравнению с двумя другими методами, нашел наиболее широкое применение на практике. Поэтому этот иетод стабилизации вторичного напряжения будет рассмотрен наиболее подробно. ШИМ регуляторы имеют следующие преимущества: • обеспечение высокого КПД и поддержание основной частоты преобразования независимо от изменения напряжения первичного питания и величины нагрузки. При этом частота пульсаций на нагрузке имеет постоянное значение, что важно при проектировании и использовании фильтров с расчетными характеристиками и может быть критичным для нагрузок с различным характером входного сопротивления; •возможность применения цепей синхронизации частоты с внешним задающим генератором, обладающим заданными параметрами. Все магнитопроводы имеют определенные ограничения по частотным характеристикам, поэтому стабильность частоты ШИМ преобразователя позволяет наиболее правильно выбирать материал сердечника для них и эффективно использовать их возможности. Структурная схема ШИМ регулятора и его подключение к каскадам ПН представлена на рис. 1.12. Напряжение на нагрузке в общем случае может быть произвольным, и поэтому устройство сравнения подключается к ней через делитель напряжения. Кроме того, предполагается, что напряжение на нагрузке находится в пределах, определяемых диапазоном регулировки, и во время работы в ней не возникает нештатной ситуации (короткое замыкание и т.п.). Устройство сравнения вырабатывает сигнал рассогласования, знак которого определяется соотношением сравниваемых входных сигналов - опорного напряжения и напряжения с выхода делителя напряжения. После необходимого усиления сигнал рассогласования U р и сигнал специальной формы U., выдаваемый 4юрмирователем опорного сигнала, подаются на второе устройство сравнения и компаратор напряжения. Компаратор выполняет квантование входного сигнала рассогласования. После компаратора сигнал управления U(| приобретает форму импульсов с заданными частотой и длительностью. Устройство согласования выполняет усиление импульсного сигнала управления до уровня и мощности, необходимой для возбуждения усилителя мощности. Временное положение выходных импульсов компаратора относительно сигнала специальной формы зависит от выбранного метода формирования последнего. Формирователь сигналов специальной формы может генерировать три вида сигналов заданной частоты: треугольной формы (рис. 1.13а), прямой пилы (положительное нарастание напряжения) (рис. 1.136) и обратной пилы (рис. 1.13в). На устройстве сравнения 2 проводится сопоставление текущих значений усиленного сигнала рассогласования U и сигнала специальной формы U Из рис. 1.13а видно, что при совпадении величин этих сигналов происходит срабатывание компаратора. Импульс положительного напряжения на его выходе появляется в момент превышения напряжением U^ текущего значения U . На диаграмме для напряжения управления UM видно, что формирование импульсного напряжения на выходе компаратора происходит с некоторым запаздываем по времени и уровню, что отражает реальную картину процессов в ШИМ регуляторе. Фронт (начало) импульса появляется, когда результирующее напряжение сравнения U совпадает с некоторым значением напряжения Д. Спад (окончание) импульса формируется при значении Uf )f равном -Д. Этот эффект называют гистерезисом. Параметры гистерезиса зависят от скорости изменения напряжения U( , а инерционность срабатывания элементов определяется временем рассасывания неосновных носителей в полупроводниковых приборах. В случае генерации сигнала треугольной формы сформированная импульсная последовательность имеет некоторое отклонение от частоты исходного сигнала специальной формы. В данном случае происходит модуляция импульсной последовательности как но длительности импульса, так и по частоте его следования. На рис. 1.136 представлены временные диаграммы работы ШИМ регулятора, формирующего управляющую последовательность с модуляцией положения фронта импульса. В данном случае производится генерация пилообразного сигнала с положительным нарастанием напряжения. Фронт импульса (с учетом гистерезиса) начинает сформироваться при совпадении напряжений U и U. на участке линейного нарастания последнего. Спад импульса жестко синхронизирован со спадом пилообразного напряжения. На нижней диаграмме рисунка показано, что спады импульсов следуют через одинаковые промежутки времени, равные периоду Т пилообразною сигнала. Использование генератора, формирующего пилообразный сигнал с линейным спадом пилообразного напряжения, приведено на рис. 1.13в. Видно, что фронт импульса появляется в момент скачкообразного изменения пилообразного сигнала. Спад импульса сформирован при равенстве напряжений U и U,, когда U. находится в интервале линейного спада. Таким образом, модуляция длительности импульса производится по его спаду. Фронты импульсов отстоят друг от друга на одинаковые промежутки времени, равные периоду Т колебаний обратного пилообразного сигнала. Структурная схема ({юрмироватсля, реализующего принцип ШИМ управления согласно рис. 1.136, изображена на рис. 1.14. Основные узлы формирователя ШИМ сигнала (см. рис. 1.14) могут быть выполнены как на дискретных компонентах, так и содержаться в одной интегральной микросхеме. Формирователь ШИМ включает в себя следующие элементы: генератор, ФПН, ИОН, линейные усилители DAI - DA3, компаратор напряжения DA4, развязывающие диады VD1 и VD2, делитель частоты на два DD1, цифровые логические элементы DD2.1 - DD2.2, каскад сопряжения с силовой частью нреобразова-геля напряжения КС. Обычно в схему ШИМ регулятора включен каскад для защиты преобразователя я короткого замыкания в нагрузке, для упрощения ie показанный на рис. 1.14. Буферный усилитель DA3 своими входами -йсод 3 и вход 4 - подключается к выходной точке санала вторичного напряжения. Вместе с функциями буферизации этот усилитель нормирует уровень
регулируемого напряжения (то есть выполняет функции делителя напряжения, приведенного па рис. 1.12) для возможности сопоставления его величины с номиналом источника опорного напряжения. Сравнение этих значений напряжения и выработка сигнала рассогласования производится усилителем DA2. Сигнал рассогласования через диод развязки VD2 подается на один из входов компаратора DA4. На второй вход компаратора поступает пилообразное напряжение, сформированное каскадом ФПН. Запуск каскада ФПН (начало линейного нарастания напряжения) и одновременный сброс процесса предыдущего периода происходит в момент прихода на него фронта импульса, вырабатываемого генератором. Генератор вырабатывает последовательность импульсов с относительно стабильными частотными характеристиками. Этим заканчивается работа ШИМ регулятора на уровне обработки аналоговых сигналов. Дальнейшее формирование ШИМ сигнала происходит цифровыми способами, при которых все активные элементы, включая и дискретные из КС, функционируют в ключевых режимах. После отработки компаратором DA4 входных воздействий на его выходе появляется последовательность импульсов, синхронных с частотой пилообразного напряжения, но с модулированной длительностью самого импульса - цифровой ШИМ сигнал. Эта последовательность поступает на входы цифровых элементов DD2.1, DD2.2, выполняющих логическую функцию И (схема совпадения по высокому логическому уровню). На второй вход каждого из элементов схемы DD2 подается последовательность импульсов, частота которых в два раза ниже исходных, формируемых генератором. Понижение частоты в два раза происходит на элементе DD1 - D-тригтере, включенном в режиме деления исходной частоты. Изменение состояния выходов триггера происходит при поступлении на его счетный вход С фронта импульса, формируемого генератором. На выходах триггера Q (прямой выход) и Q (инверсный выход) в каждый момент времени сигналы противофазны. В моменты совпадения высоких уровней сигналов от компаратора и сигналов от делителя частоты (триггера) на входах элементов DD2 и на их выходах появляются импульсы высокого уровня. Периодичность импульсов на выходе каждого из элементов DD2 совпадаете периодом исходной частоты генератора деленной на два. Графически процесс работы ШИМ регулятора показан в виде диаграмм на рис. 1.15. Точки на схеме (см. рис. 1.14), для которых приведены эпюры напряжений, отмечены цифрами в кружочках. Для наглядности на второй диаграмме (см. рис. 1.15) кривые напряжений для точек 1 (пилообразное напряжение) и 2 (напряжение на выходе буферного усилителя DA1) совмещены. Работа данного ШИМ регулятора осуществляется следующим образом: на каскад согласования КС от каждого из элементов схемы DD2 поступают две сдвинутые по времени последовательности импульсов. Это обусловлено спецификой построения силового каскада преобразователя напряжения. Длительность импульсов в каждой последовательности находится в обратно пропорциональной зависимости от текущей величины напряжения вторичной цепи (на нагрузке). Силовой каскад преобразователя находится в активном состоянии (передачи энергии) в нагрузку в течение действия на него модулированных по длительности импульсов. Так происходит регулировка выходного напряжения для поддержания его уровня в заданных пределах. Усилительный каскад DA1 предусмотрен для отключения (блокировки) схемы ШИМ регулятора во время резкого возрастания потребления тока в нагрузке. Входы схемы DA1 подключаются к датчику тока, установленному в цепи нагрузки. Пока разность потенциалов на входах DA1 не превышает заданной величины, то есть ток потребления нагрузки не выходит за верхнюю допустимую границу, ШИМ регулятор работает в обычном режиме. В момент возрастания тока нагрузки выше установленного предела на выходе DA1 напряжение повышается до величины, достаточной для открывания диода VD1. На катоде VD1 создается положительное напряжение, закрывающее диод VD2. Сигнал рассогласования, поступающий от усилителя ошибки DA2 на вход компаратора DA4, шунтируется. Напряжение, установленное на входе компаратора, вызывает резкое сужение импульсов, поступающих от него на цифровые схемы DD2.1 и DD2.2. Силовая часть преобразователя переходит в защищенный режим работы, принудительно ограничивая уровень энергии, передаваемой на КС. ШИМ регулятор автоматически восстанавливает работоспособность после устранения перегрузки! по выходу.