Главная » » Принцип работы шагового управления двигателем
01:16
Принцип работы шагового управления двигателем
Название шагового двигателя Шаговый двигатель (шаговый двигатель), шаговые двигатели (ШД), или импульса двигателя (импульсный двигатель), другие, такие как (шаговый двигатель), и т.д. ... ... имеют широкий диапазон адресов, эти слова, прозвучавшие на японском время, чтобы стать этапом перемещения двигателя, и, шаг за шагом и этап этапе действия смысл действия, которых все выразили на другом языке, когда значение, чтобы стать степпинга Драйв, одним словом, то есть будет входных импульсов определенным углом, распространение, модификацию вала двигателя. Шаговый двигатель профиля: Шаговый двигатель электрических импульсных сигналов в угловое перемещение или линейное перемещение контур управления компонентов открытым. В случае не перегруженный, скорость вращения двигателя, положение остановки зависит только от частоты пульса и число импульсов, независимо от изменения нагрузки, то есть, чтобы добавить импульс двигателя, двигатель включен шаг угол. Существование этой линейной зависимости, в сочетании с шаговым двигателем только периодические ошибки без учета накопленного ошибки и так далее. Делает скорость, положение и в других областях управления для управления шаговым двигателем становится очень простым. Однофазные шагового двигателя водитель с одной электрических импульсов, мощность, как правило, мала, и ее использование в качестве небольшой мощности привода. Как-фазы шагового двигателя многофазных сквер Драйв пульсовой волны, очень разносторонний. При использовании фазы шагового двигателя несколько, один электрический импульс через импульсный сигнал может быть преобразован в импульсный сигнал дистрибьютор этап мульти-, соответственно, в ответ от усилителя мощности в обмотках шагового. Введите импульса к импульсу для каждого поставщика, электрические государственной власти каждой фазы изменения, ротор станет определенным углом (так называемый шаг угол.) При нормальных обстоятельствах, шаговый двигатель угол поворота и общее число импульсов пропорциональна входной; непрерывный импульсный вход при определенной частоте, частота вращения двигателя и частота импульсов вход для поддержания строгого соответствия, независимо от колебаний напряжения и изменения нагрузки воздействия. В случае перегрузки, не, частота вращения двигателя, положение остановки зависит только от частоты пульса и число импульсов, независимо от воздействия изменения нагрузки, то есть, чтобы добавить импульс двигателя, двигатель включен шаг угол. Шагового двигателя вращающейся структуры две большие категории: 1 круглая, как показано 2 поворотных двигателя линейный двигатель, структура, как круглые, как вращающийся двигатель запускается, как показано на рисунке B
Во-первых, шаговый двигатель типа Теперь, что появляется на рынке Есть много типов шаговых двигателей, в соответствии с целью такого исполнения и использования различия между различными видами использования. Например, различия между их различными использования точность контроля положения смешанного решения, или хотели бы использовать простой контроль затрат низким системы, состоящей из ПМ типа, магнитные структуры классификации двигателя, поэтому он будет влиять на производительность , другой имеет форму в соответствии с появлением шагового двигателя для классификации, но и по отношению к числу классификации водитель, и схема классификации диска. Для ротора шагового двигателя можно разделить на три категории. <1> PM-шаговый двигатель типа: с постоянными магнитами (постоянного 3QC838 <2> VR-типа шаговых двигателей: переменная нежелание переменной 3QC838 <3> HB-типа гибридных шаговых двигателей, композитный (гибридный 3QC838 1, ПМ-типа PM тип шаговый двигатель принципа структура, показанная на рисунке 1, ротор состоит из постоянных магнитов, далее на множество настроен вокруг неподвижной югу. На рисунке 2.2.1, магниты ротора для N, S пары, и это установленный четыре подгруппы катушки структуры, такие, как, и непосредственно связанные с шагом угол, так как требует более тонкой шаг угол, ротора магнита и появление очень мало драйверов фиксированного числа к югу от катушки не может соответствовать увеличению, а также структуры на рисунке 1, шаг углом 90 °.
Рис 1 вечера типа шагового двигателя из схемы (2-фазе однополярный) Кроме того, премьер-функций является то, что постоянными магнитами в роторе формируется, так что даже в отсутствие возбуждения (обмотки статора не подается таковые имеются) должны быть сохранены в некоторой степени, возникновение крутящего момента, который, в соответствии с использованием этого характер эффекта, может являться одной из форм энергосберегающих интегрированной системы. Шаговый двигатель, и его различные типы шаг углом, кобальта самария магниты в ротор 45 ° или 90 °, но и они также могут использовать Левин железа фторид (феррит) магниты как многополярного намагниченности, являются 3,75 °, 11,25 °, 15 °, 18 °, 22,5 ° и так богаты видами, но от этих цифр показывает 7,5 ° (поворот 48 шагов) является самым популярным.
2, VR-основанные Строительство VR-типа шагового двигателя показано на рисунке 2, ротор использования ротора вдруг свою очередь, очень привлекательная сил, которые происходят, и, таким образом в отсутствие VR-типа, когда возбуждение не возникает для поддержания крутящего момента.
Рисунок 2 типа ВР-шаговый двигатель от схемы (2-фазе 3QC838
Главная цель момент в большей работы по механической или специальное использование малого объема механической стартер. Также полезно в других усилий по 1W ультра-малых двигателей на следующий, словом, VR типа очень малое число, в шагового двигателя на всех уровня производства из немногих% только. Кроме того, есть тип шаг углом 15 °, 7,5 °, а также имеет 1,8 °, а в число 1,5 ° шагом самых популярных.
3, НВ смешанных Гибридный шаговый двигатель определяется магнитным статора (зубы), чтобы полюса и полюса ротора и его поставленный, он ближе к ротора зубы наиболее автомобиль типа, в которых вал и по намагничивается в том же направлении, сочетание постоянных магнитов, а также в структуре типа, чем предыдущие вечера и VR типа является более сложной, в основном, VR можно рассматривать интеграцию типа и PM-тип структуры. гибридного типа со смешанным типом смысл существования, это точно между типа VR и сочетания типа ситуации вечера, так что есть так называемый. Вообще смешанные, в связи с высокой точностью, большим крутящим моментом, малым углом шаг несколько выдающихся особенностей, поэтому отношения начались в О.А., другие классификации используется значительным, особенно в объеме производства составляет более половины отношения с памятью головой вперед на диск. Кроме того, есть шаг углом 0,9 °, 1,8 °, 3,6 ° и другая, чем другим мотором, с очень тонкой шаг угол. Рисунок 3 показывает структуру гибридной карте шагового двигателя, здесь, на стороне катушки возбуждения статора 8 Департамент, немного ближе к кончику на магнитных комплекс мелкие зубы (зуб автомобиля мыщелковый полюса), который является средством для ротора стороне зубов-как полюс, и привод шагового механизма.
Рисунок 3 Строительство гибридных диаграммы шагового двигателя (2-фазе 3QC838
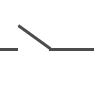
Во-вторых, шаговый двигатель вождения принцип С двигателем шаговый механизм, с простой Краткое описание структуры диаграммы на рисунке 3QC838 Для иллюстрации принципа шагового двигателя структурные карты, фиксированной структурой магнита с 4 связать его под ним имеет подвижный магнит на этих, и, в магнит на нижней стороне направляющие ролики для установки загрузки вала прямой вдоль левого и правого движущихся структуры.
Рисунок 4 Линейные шаговые двигатели вождения принцип
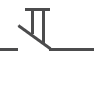
Так, в этом движении принимают возможность дополнительного показывает, шаговый двигатель, и теперь, магнита и подвижный магнит Mg L1 взаимодействия магнитного притяжения производится, поэтому здесь, где, () положение Министерства производить еще слайд роли, а затем L2 электромагнита возбуждения, когда электромагнита только L1 OFF, подвижный магнит, который притягивается к магниту прилагается на должность L2, быть в (б) положение, и далее в соленоиде L3 от возбуждения, ранее соленоида L2 OFF, из-за этого подвижный магнит, чтобы перейти к позиции до соленоида L3, чтобы быть в (с) положение. Следующие, согласно которой все движения и повторяющиеся операции, перемещение магнита будет двигаться в направлении, указанном стрелкой, которая, в соответствии с операцией последовательных действий, как это, вы можете достичь вид привода (в этом линейное движение), Кроме того, магниты, используемые в L1 ~ L4, в любой движущийся магнит (Mg) на стороне, должны произвести N-полярным тока. Кроме того, в этом структурная карта не упоминается только четыре соленоида только, необходимо также увеличить соответствующий номер. Рисунок 4 для линейного перемещения двигателя, короче говоря, относятся к линейным шагового двигателя, который, как это не может быть преобразование ситуации, поэтому, для того чтобы быть некоторые усилия, чтобы быть в переходе, Рисунок 5, с тем чтобы только линейные Строительство роторного типа Таким образом, это сводит принципе в природе и того же типа линейного движения.
Рисунок 5 как структура продукта перевода
В-третьих, характеристики шаговых двигателей <1> угол поворота пропорциональна входной импульс, так что вы можете использовать программное управление для достижения точных углов и точности позиционирования требования высоки. <2> для запуска, остановки, обращая ответ хорошо, легко управлять. <3> каждый шаг балл ошибки невелика, и нет кумулятивных ошибки. <4> в контексте управления, передачи скорость и импульс частотой, пропорциональной скорости диапазон очень широк. <5> по-прежнему, шаговый двигатель, чтобы поддерживать высокий крутящий момент (удерживающий момент), может быть сохранена в нейтральное положение, без использования тормозов, что не будет свободно вращаться. <6> в низкой скорости с высоким крутящим моментом. <7> надежность, отсутствие обслуживания, низкая стоимость всей системы. <8> на высокой скорости легко шаг <9> на частоте склонны к вибрации или резонанса
В-четвертых, выбрать параметры шагового двигателя
Введение крутящего момента (тянуть в 3QC838 Шаговым двигателем крутящего момента вводится для синхронизации входного сигнала для запуска, остановки, когда максимальный крутящий момент, поэтому введение крутящий момент двигателя в следующих областях могут быть синхронизированы с входным сигналом для запуска, остановки и реверсирования, и эта область С начала области по телефону (старт-стоп область). Так как максимальный пусковой момент (максимальный пусковой 3QC838 Так как пусковой момент максимальна, когда волны от артерии была ниже, чем 10pps, шаговый двигатель может быть синхронизирован с входной сигнал для запуска, остановки максимального крутящего момента. С начала частота крупнейших двигателя в холостом (крутящий момент равна нулю), максимальная скорость входных импульсов, то двигатель может быть мгновенной остановки, запуска. Экструзионные крутящий момент (выдвижной момент) от стартовой частоты из крупнейших (максимум начиная 3QC838 Пролапс является крутящий момент двигателя шаговый могут быть запущены одновременно с входным сигналом, но не может мгновенно запускать, останавливать, когда максимальный крутящий момент, крутящий момент двигателя не может превышать экструзии операции, в то время как введение между моментом экструзии и крутящий момент в следующих областях двигатель не может мгновенно запускать, останавливать, эта область называется обратной зоны (убил области),若欲области в обратном запускать, останавливать, необходимо сначала вернуться к самозапуска двигательной области, или причинение шаг явление. Максимальная частота ответа (максимальная 3QC838 Максимальная частотная характеристика двигателя на холостом ходу (крутящий момент равен нулю), максимальная скорость входного импульса, то двигатель не может мгновенно остановить, запустить. Момент удержания (удерживающий 3QC838 Момент удержания является случай, когда катушку, ротор остаются нетронутыми, внешние изменения нагрузку от положения ротора, необходимых для максимального крутящего момента. Шаговые момента двигателя и скорости экспоненциального обратная связь, то есть, больше крутящего момента, когда скорость меньше, наоборот больше скорость меньше крутящего момента, это явление связано с возбуждением катушки индуктивности и сопротивления можно рассматривать как последовательной цепи, когда ток возбуждения и катушки сопротивления и индуктивности отношения между следующее 3QC838 3QC838
Один постоянной времени . Из (1) показывает, катушки ток возбуждения меняется со временем, а крутящий момент пропорциональна размеру и ток, поэтому, когда ток катушки Низкая скорость достаточно времени, чтобы достичь максимума, таким образом крутящий момент является относительно большой, то же , когда преобразования сигнала возбуждения скорость резко возрастает, что делает в результате крутящий момент катушки ослабления текущего спада.
В-пятых, шаговый двигатель 3QC838 * Фаза: генерировать очень разные по N, S число магнитной катушки возбуждения поля. Общие м сказал. * Шагов: завершение количество импульсов, необходимых для циклические изменения в магнитном поле или проводящее состояние с п сказал, или что оказалось угол наклона мотора импульсов, необходимых для четырех фаз двигателя, например, четыре фазы четыре этапа подход, который * CD-DA-AB, четыре фазы восемь поэтапный подход, который-AB-B-BC-C-D-CD-DA-. * Шаг угол: соответствует импульсный сигнал, угловое смещение ротора повернуты на θ сказал. θ = 360 K (J * осуществление ротора количество зубов шагов), обычных двух, четырех-фазы, ротор зубов 50 зуба двигателя в качестве примера. Четыре шага выполнения шага углом θ = 360 ° / (50 * 4) = 1,8 градусов (обычно называют целый шаг), восемь шагов осуществления шаг углом θ = 360 ° / (50 * 8) = 0,9 градусов (широко известный как полшага.) * Позиционирование момент: двигатель не подается, блокировка ротора момент его собственный (а также профиль магнитного поля гармоник, вызванные механическими ошибке.) * Статический крутящий момент: двигатель при номинальной статическое электричество, двигатель без вращения, вал замок крутящего момента. Крутящий момент двигателя является мерой объема (геометрии) стандартов, а напряжение питания и мощность привода и т.д. не имеет ничего общего. Хотя статического момента пропорциональна электромагнитных намагничивания оказывается ампер, и фиксированной воздушный зазор между ротором зубы, но чрезмерное использование сокращенного воздушный зазор, увеличение возбуждения ампер-витков увеличить статический крутящий момент нежелательно, это может вызвать нагревание двигателя и механический шум.
В-шестых, шаговый двигатель процессе работы
Импульсный сигнал поколения Импульсный правило, производятся центральным процессором или микроконтроллером, доля общего импульса около 0.3-0.4, тем выше скорость вращения двигателя, соотношение выше. Микропроцессорный -Фазы шагового двигателя четыре, например, работать четыре-фазный двигатель Есть два, четыре фазы четыре этапа для AB-BC-CD-DA, четыре фазы восемь шагов для AB-B-BC-C-CD-D-AB. Усилитель мощности Шаговый привод усилителя мощности является наиболее важной частью системы. Шаговым двигателем крутящего момента при определенной скорости в зависимости от среднего тока, а не его динамические тока покоя (и образец тока статический ток). Больше, чем больше средний ток момента двигателя для достижения этой цели требует больших средний ток для преодоления системы привода мотора, так как ЭДС. Таким образом по разным поводам взять другой диск, до сих пор, вождение способ иметь следующие: постоянное давление, постоянное сопротивление, высокого и низкого напряжения привод, постоянный ток, число таких сегментов.
Рисунок 6 Схема шагового двигателя управляющая
Семь, шаговый двигатель эксплуатационные 3QC838
Рисунок 6 блок-схема шаг управления двигателем, шаговые контроллер управления микрокомпьютера электротехники, когда управляющий сигнал от микрокомпьютера выход, то диск будет означать усиление, целью контроля мотора, не существует общего управления потоком использование любого сигнала обратной связи, поэтому управление двигателем шаговый режим типичный замкнутый контур управления (замкнутый цикл управления). Преимущества управления с обратной связью системы управления просто не сигнал обратной связи поэтому более низкой стоимости без датчика, но именно из-за управления шаговым двигателем, чтобы открыть управления, так что если шаговый двигатель или срыв происходит, когда ситуация не будет немедленно воспользоваться датчика поправки вернуться к делать ошибки компенсации позицию, решать подобные проблемы могут только начинаем понимать характеристик шагового двигателя операции. Так называемый срыв, когда скорость вращения ротора не успевает за скоростью, когда статора возбуждения, в результате чего ротор перестает вращаться. Электрические двигатели имеют различные стойло явления могут возникать, в общем приложений двигателя, срыв часто является причиной последствий горения обмотки катушки, но мотор стойло шаговых еще только в результате мотор катушки, в то же время захватывающих , а потому, что это импульсный сигнал, катушка не будет гореть. Полностью срыв вращения ротора не может держать полностью все еще интересно, это шаг вызывает мгновенное увеличение скорости работы двигателя, так как крутящий момент и скорость обратно пропорциональна, поэтому снижение не может загружать внешние момент нагрузки, в результате применения стрелкового Величина проскальзывания. Ситуация в ногу шаговый двигатель будет только в том случае, может последовать за шагом, чтобы предотвратить шагового двигателя скорость - кривая крутящего момента от ускорения развертывания программы управления двигателем. На рисунке 7 показана характеристика из шагового двигателя, скорость фигура оси абсцисс отложено число импульсов в секунду (импульсов в секунду). С двигателем характеристической кривой как крупнейший разница линии шаговых двигателей Есть два характерных кривых, в то время нормальной работы шагового двигателя может быть ограничен между введением крутящего момента. Показано на рисунке 7, динамических характеристик каждая из них будет описан 3QC838
Рисунок 7 шагового двигателя характеристика
Восемь, использование шагового двигателя Как шагового двигателя диска сигналы используются для импульсного сигнала и, следовательно, добавил к общей двигателя постоянного тока обмотки, двигатель не непрерывное вращение. Кроме того, шагового двигателя мощностью шнур не менее пяти, по одному для общего контактов, а оставшиеся четыре фазы, + фазе, фазе, B + четыре фазы вход, некоторые из шагового двигателя в общей сложности шесть линий электропередач, две из которых Раздел для полный контакт, фазы, + и фазой B, B + четыре фазы входных точек на две группы. Всего контактов различать, что является и то, что вход и положительные и превратить возбуждения последовательность может первый файл вольтметр, измерить сопротивление катушки Аум, в теории, значение сопротивления каждого этапа должны быть равны, чтобы найти в общей сложности контакты после токах ниже номинального напряжения питания постоянного тока по одному тест, можно определить степпинг двигателя, изменение последовательности возбуждения.
IX Принцип действия шагового двигателя
Рисунок 1 состоит из четырех фаз (на самом деле 2-фаза) основные структурные карты шагового двигателя. Середине ротора составляет от постоянного магнита, уехал в полюс N, S полюс на другую сторону. Есть четыре комплекта катушек статора, соответственно, L1, L2, L3 и L4, терминал С катушки были положительными питания, другой конец подключен к источнику питания путем переключения отрицательных, на рисунке 3QC838 Когда мы нажимаем переключатель S1, катушки переходят в ток, в результате чего Северный Полюс магнитного поля, так как магнитное отталкивание же пола, противоположного пола притяжения, так что ротор полюса S является очень привлекает. Во-вторых, отпустите переключатель S1, и немедленно нажать переключатель S2, полюса магнитного поля, B полюса магнитного поля, S-полюса ротора притягиваются, ротор с часовой стрелки на 90 градусов. Как это для того, чтобы пройти в ток статора из четырех полюсов, вы можете сделать ротор вращается.
Шагая мотор в зависимости от различных фаз обмотки статора можно разделить на две фазы, четыре фазы и пять фаз, малые фазы шагового двумя двигателями, чтобы быть более распространенным явлением.
Однополярный типа (однополярный): направление полюсов статора для одной полярности, например, переменная нежелание шаговых двигателей, катушка только одна группа, увеличение тока возбуждения в фиксированном направлении, так что однополярный шагового двигателя, что власти относительно проста. Однополярный привод цепи, используя четыре транзистора на диске две фазы шагового двигателя, двигателя структура показана на рисунке 9 содержит два набора катушек с центральным отводом, двигатель в общей сложности шесть линий, соединяющих с внешним миром - Рисунок 9. Эти двигатели иногда называют четыре фазы двигателя, но этот термин не может легко различать людей не правильно, потому что это на самом деле только две фазы, точнее, должна быть двухфазной шесть проводов шагового двигателя. Хотя-провод шагового двигателя шесть однополярного шагового двигателя также известно, в самом деле, возможность использовать как однополярного или биполярного привод цепи.